“Aunque cada lenguaje de programación tiene muchas bibliotecas para propósitos específicos, la biblioteca POSIX de C tiene su lugar. Ha sido diseñado para crear una gran armonización entre los procesos y ayuda mucho en el uso de subprocesos múltiples dentro de los programas, es decir, creando múltiples subprocesos y sincronizando su ejecución. Dentro de esta guía de hoy, verá una ilustración simple del uso de semáforos POSIX en C. Para los ejemplos básicos de código C, debemos configurar su compilador en el sistema. Pero, antes de eso, necesitamos actualizar el sistema, ya que es un paso imprescindible para la ejecución fluida del código. Por lo tanto, la consulta que se muestra en el complemento adjunto es imprescindible para actualizar y actualizar su sistema operativo Linux con la utilidad 'apt'.

Este proceso requirió aproximadamente 55 Kb de espacio en su plataforma Linux para realizar las actualizaciones sin problemas. Si está dispuesto a dar tanto espacio, toque 'y' para continuar. El procesamiento se completará en unos minutos.

Después de que el sistema se haya actualizado por completo, configuraremos el compilador del lenguaje C en nuestro sistema con la utilidad apt-get en el comando 'instalar'. Use 'gcc' como palabra clave, y eso es todo.

sem_init()
Se crearía un nuevo semáforo cuando ya existe un semáforo no identificado en 's'; de lo contrario, ese semáforo ya existente será descartado. A lo largo de este método, 's' representa una instancia de semáforo que se ha construido y compartida es una señal o un banderín que indica si el semáforo se puede distribuir con un método bifurcado() o de otra manera. El valor de entrada sirve como punto de inicio establecido del semáforo.
Int sem_init ( nor_t * s, int compartido, valor int sin firmar ) ;
Sem_espera()
Al ejecutar una acción de bloqueo de semáforo en el semáforo especificado por 's', el método sem_wait() mantiene ese semáforo. El procedimiento sem-wait se utilizará para retener un semáforo o dejarlo en línea. Algunos de los procesos previamente sobrecargados se despiertan cuando algún otro proceso invoca sem_post().
int sem_esperar ( nor_t * s ) ;
no_post()
Cuando se llama a sem post, el valor aumenta y luego comienza a ejecutarse una de las operaciones previamente respaldadas o en espera, es decir, desbloquea el semáforo ya bloqueado.
int sem_post ( nor_t * s ) ;
no_destruir()
Un semáforo sin nombre inicializado 's' se destruye empleando la función sem destroy().
int sem_destroy ( nor_t * s ) ;
Ejemplo
Para comprender los semáforos, primero vamos a crear un archivo C y luego le agregaremos un código. Para crear uno, use la consulta 'toque' y encontrará el nuevo archivo en la carpeta de inicio de su sistema.

Ahora, debe abrir su archivo C vacío con un editor simple para generar un buen código en él. Hemos estado probando el editor 'nano' hasta ahora, como se muestra en el complemento a continuación.

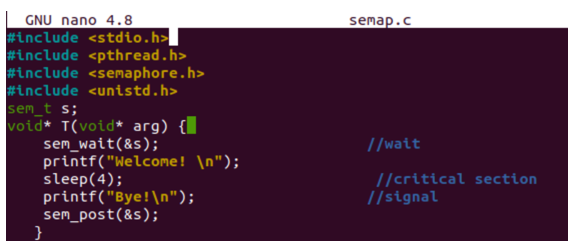
Como todos sabemos, todos los lenguajes de programación no pueden funcionar sin bibliotecas, ya que estas bibliotecas contienen una gran cantidad de clases, estructuras, funciones y objetos que se utilizarán para el funcionamiento general del sistema. Así que estamos comenzando este programa C con el uso de algunas bibliotecas básicas e imprescindibles para los semáforos POSIX.
Para usar estas bibliotecas en el código, tenemos que usar el carácter '#' con la palabra clave 'incluir' para cada biblioteca. En este momento, hemos agregado un total de 4 bibliotecas que se deben tener en este programa. De lo contrario, nuestro programa no funcionará correctamente. La primera biblioteca de encabezados 'stdio.h' suele ser imprescindible en todos los programas en C porque nos permite tener operaciones de entrada y salida en el código. Por lo tanto, lo estamos usando para agregar entradas y obtener salidas del código sin problemas. La segunda biblioteca que estamos usando aquí es 'pthread.h', que es imprescindible para el uso de la programación de subprocesos, es decir, subprocesos múltiples.
Usaremos esta biblioteca para crear hilos en un programa. La biblioteca siguiente y más importante en este código es 'semaphore.h'. Se ha utilizado para sincronizar suavemente los hilos. Por último, pero no menos importante, la biblioteca es 'unistd.h', que nos permite utilizar constantes y funciones misceláneas definidas por el usuario. Ahora, hemos declarado el semáforo 's' usando el objeto integrado 'sem_t' de la biblioteca de semáforos. Aquí viene la función definida por el usuario del subproceso 'T' sin tipo de retorno. Ha estado utilizando algunas funciones de semáforo integradas para realizar la sincronización. La función sem_wait() está aquí para contener el semáforo 's' usando el carácter '&'.
Dentro de la espera, se ejecutó la instrucción printf() junto con la función 'dormir' para hacer que este programa durmiera durante 4 segundos. Otra instrucción printf() muestra un nuevo mensaje y la función sem_post() se ejecuta para liberar el bloqueo del semáforo 's'.
#incluir#incluir
#include
#include
tampoco_t s;
vacío * T ( vacío * argumento ) {
sem_esperar ( & s ) ;
imprimir ( '¡Bienvenidos! \norte ' ) ;
dormir ( 4 ) ;
imprimir ( '¡Adiós! \norte ' ) ;
sem_post ( & s ) ;
}
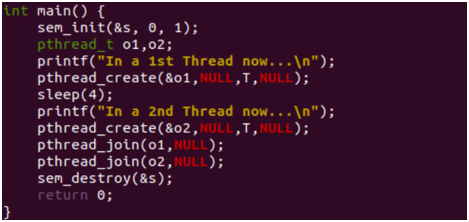
Echemos un buen vistazo al método main() de este programa C para semáforos. La función sem_init() se ha utilizado aquí para crear un nuevo semáforo 's' que no se ha distribuido con un método bifurcado(), es decir, '0', y su punto de partida se establece en 1. El objeto pthread_t del pthread La biblioteca de C se utilizó para crear dos subprocesos utilizando dos objetos de subprocesos, o1 y o2. La instrucción printf() está aquí para mostrar que vamos a crear el primer hilo usando la función pthread_create() en la siguiente línea.
Hemos estado pasando el objeto de subproceso o1 a esta función con restricciones NULL y llamando a la función 'T' pasándola en los parámetros. Después de una suspensión de 4 segundos, se creó otro subproceso con el objeto o2, y aquí se utiliza la función pthread_join() para unir los subprocesos con una función main(). La función sem_destroy() está aquí para destruir el semáforo 's', y todos los subprocesos bloqueados también se liberarán.
int principal ( ) {sem_init ( & s, 0 , 1 ) ;
pthread_t o1, o2;
imprimir ( 'En un primer hilo ahora... \norte ' ) ;
pthread_create ( & o1,NULO,T,NULO ) ;
dormir ( 4 ) ;
imprimir ( 'En un segundo hilo ahora... \norte ' ) ;
pthread_create ( & o2,NULO,T,NULO ) ;
pthread_join ( o1,NULO ) ;
pthread_join ( o2,NULO ) ;
no_destruir ( & s ) ;
devolver 0 ;
}
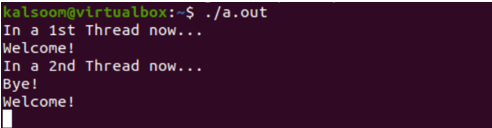
Estamos compilando el programa C con el compilador “Gcc”; las opciones “-lrt” y “-lpthread” se utilizan para ejecutar las funciones de hilo POSIX. Al ejecutar la consulta '.a/.out', se creó el primer hilo. Se va a dormir después de imprimir el primer mensaje.

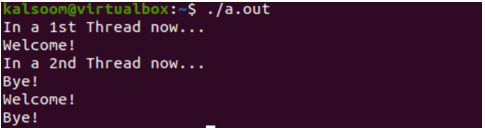
El segundo subproceso se sincronizó, y después de 4 segundos, el primer subproceso se liberó y el segundo subproceso se bloqueó durante 4 segundos.
Al final, también se publicó el segundo hilo.
Conclusión
Eso es todo sobre los semáforos POSIX en C mientras utiliza algunas de sus funciones principales para sincronizar diferentes hilos. Después de leer este artículo, podrá comprender POSIX cada vez más.